") 介紹CosmosMotion及LabVIEW機(jī)械仿真
介紹CosmosMotion及LabVIEW機(jī)械仿真

聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
LabVIEW
+關(guān)注
關(guān)注
2017文章
3688瀏覽量
347272 -
仿真
+關(guān)注
關(guān)注
54文章
4488瀏覽量
138322 -
NI
+關(guān)注
關(guān)注
19文章
1126瀏覽量
104881
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
【產(chǎn)品介紹】Modelsim:HDL語言仿真軟件
概述ModelSim是業(yè)界最優(yōu)秀的HDL語言仿真軟件,它能提供友好的仿真環(huán)境,是業(yè)界唯一的單內(nèi)核支持VHDL和Verilog混合仿真的仿真器。它采用直接優(yōu)化的編譯技術(shù)、Tcl/Tk技術(shù)

【產(chǎn)品介紹】Altair MotionView支持多體仿真與優(yōu)化軟件
AltairMotionView支持多體仿真與優(yōu)化AltairMotionView革新了多體仿真、可視化和優(yōu)化。與AltairMotionSolve相結(jié)合,可提高工程生產(chǎn)力并加速設(shè)計(jì)迭代。憑借
【產(chǎn)品介紹】Altair HyperWorks多物理場(chǎng)仿真軟件
AltairHyperWorks設(shè)計(jì)和仿真平臺(tái)Altair設(shè)計(jì)和仿真平臺(tái)涵蓋眾多學(xué)科,可以仿真結(jié)構(gòu)、運(yùn)動(dòng)、流體、熱學(xué)、電磁學(xué)、電子學(xué)、控制和嵌入式系統(tǒng)。解決方案還提供人工智能解決方案和高保真
協(xié)作機(jī)械臂產(chǎn)品介紹
電子發(fā)燒友們、工業(yè)自動(dòng)化從業(yè)者、科研工作者們注意啦!今天給大家重磅介紹一款在機(jī)械臂領(lǐng)域表現(xiàn)極為亮眼的產(chǎn)品——協(xié)作機(jī)械臂,它正以卓越性能重塑行業(yè)格局!?(壹捌伍 柒零零玖 壹壹捌陸)卓越負(fù)載能力,滿足
發(fā)表于 08-07 17:20
?0次下載
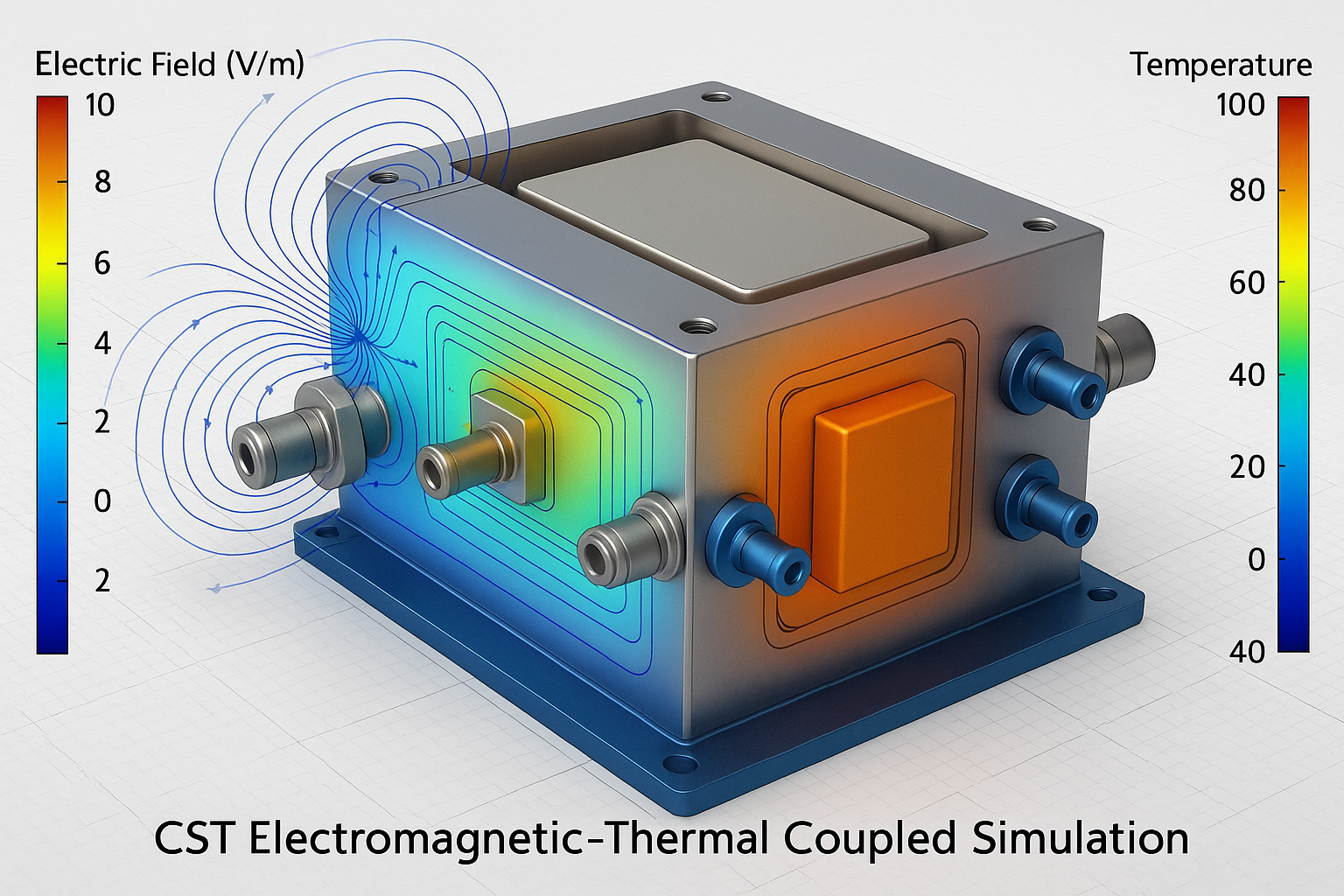
電磁遇上熱與應(yīng)力-CST多物理場(chǎng)仿真解決復(fù)雜工程挑戰(zhàn)
當(dāng)電磁遇上熱與應(yīng)力,CST MPhysics Studio提供真正的全耦合多物理場(chǎng)仿真能力。電磁-熱耦合、熱失諧分析、熱-機(jī)械耦合、電磁-機(jī)械耦合,解決復(fù)雜工程挑戰(zhàn)。
【原創(chuàng)】labview布爾控件機(jī)械動(dòng)作中單擊時(shí)轉(zhuǎn)換和其它值變化的區(qū)別以及實(shí)際場(chǎng)景應(yīng)用
網(wǎng)上一些資料對(duì)布爾控件的機(jī)械動(dòng)作描述不容易吸收理解,在此簡(jiǎn)要介紹。
1、布爾控件有6種機(jī)械動(dòng)作,均可以在事件結(jié)構(gòu)中做為事件源
2、機(jī)械動(dòng)作中,單擊時(shí)轉(zhuǎn)換和其它5種動(dòng)作有明確的區(qū)別:
“
發(fā)表于 07-02 18:05
Arduino與LabVIEW聯(lián)合編程指南
Arduino編程并與LabVIEW上位機(jī)結(jié)合實(shí)現(xiàn)設(shè)備的遠(yuǎn)程控制與數(shù)據(jù)采集。
發(fā)表于 06-19 15:54
?3次下載
詳解ADC電路的靜態(tài)仿真和動(dòng)態(tài)仿真
ADC電路主要存在靜態(tài)仿真和動(dòng)態(tài)仿真兩類仿真,針對(duì)兩種不同的仿真,我們存在不同的輸入信號(hào)和不同的數(shù)據(jù)采樣,因此靜態(tài)仿真和動(dòng)態(tài)
LabVIEW的詳細(xì)簡(jiǎn)介和應(yīng)用(文末免費(fèi)分享LabVIEW相關(guān)資料合集)
LabVIEW是一種程序開發(fā)環(huán)境,由美國(guó)國(guó)家儀器(NI)公司研制開發(fā),類似于C和BASIC開發(fā)環(huán)境,但是LabVIEW與其他計(jì)算機(jī)語言的顯著區(qū)別是:其他計(jì)算機(jī)語言都是采用基于文本的語言產(chǎn)生代碼,而

第三章 仿真器介紹
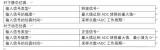
本篇文章我們介紹了W55MH32板載的WIZ-Link仿真器的使用方法,讓我們一起插上USB線開始下載、調(diào)試程序吧!
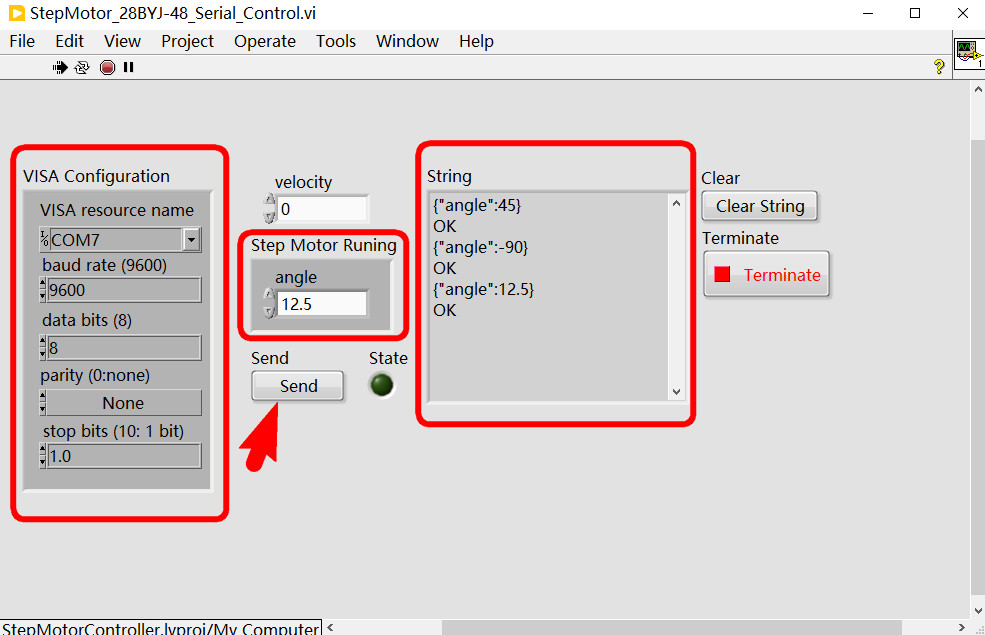
步進(jìn)電機(jī)的 LabVIEW 控制與應(yīng)用
本文介紹了 RP2350 開發(fā)板使用 LabVIEW 上位機(jī)串口發(fā)送指令,實(shí)現(xiàn)步進(jìn)電機(jī) **單步** 和 **連續(xù)** 旋轉(zhuǎn)指定角度的項(xiàng)目設(shè)計(jì)。進(jìn)一步結(jié)合具體的應(yīng)用場(chǎng)景,設(shè)計(jì)了開發(fā)板與儀器的聯(lián)合調(diào)用、進(jìn)而實(shí)現(xiàn)數(shù)據(jù)自動(dòng)采集的應(yīng)用案例。結(jié)合其他應(yīng)用場(chǎng)景,有針對(duì)性地提出了工程
電機(jī)聯(lián)軸控制的旋轉(zhuǎn)機(jī)械定轉(zhuǎn)子模態(tài)分析
介紹了一種電機(jī)聯(lián)軸控制的旋轉(zhuǎn)機(jī)械結(jié)構(gòu)。振動(dòng)模態(tài)分析是電機(jī)優(yōu)化設(shè)計(jì)的重要步驟,本文利用ANSYS有限元軟件對(duì)定轉(zhuǎn)子模態(tài)模型進(jìn)行了詳細(xì)的計(jì)算和分析,得到了其模態(tài)固有頻率和振型。仿真結(jié)果對(duì)振動(dòng)實(shí)驗(yàn)和定轉(zhuǎn)子
發(fā)表于 04-24 21:07

LabVIEW運(yùn)動(dòng)控制(四):EtherCAT運(yùn)動(dòng)控制器的周期上報(bào)功能#正運(yùn)動(dòng)技術(shù) #LabVIEW
LabVIEW
正運(yùn)動(dòng)技術(shù)
發(fā)布于 :2025年04月24日 09:56:02
MATLAB電機(jī)仿真精華50例【干貨】
、調(diào)整特性分析,發(fā)電機(jī)突然短路,直流電機(jī)機(jī)械特性、轉(zhuǎn)矩特性、起動(dòng)、調(diào)速與制動(dòng)的仿真實(shí)例。3、異步電機(jī)內(nèi)容包括三相異步電機(jī)的機(jī)械特性、αβ0系統(tǒng)異步電機(jī)仿真模型、dq0系統(tǒng)異步電機(jī)
發(fā)表于 04-01 16:23



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論