") 關(guān)于步進(jìn)電機(jī)控制模塊程序設(shè)計(jì)
關(guān)于步進(jìn)電機(jī)控制模塊程序設(shè)計(jì)

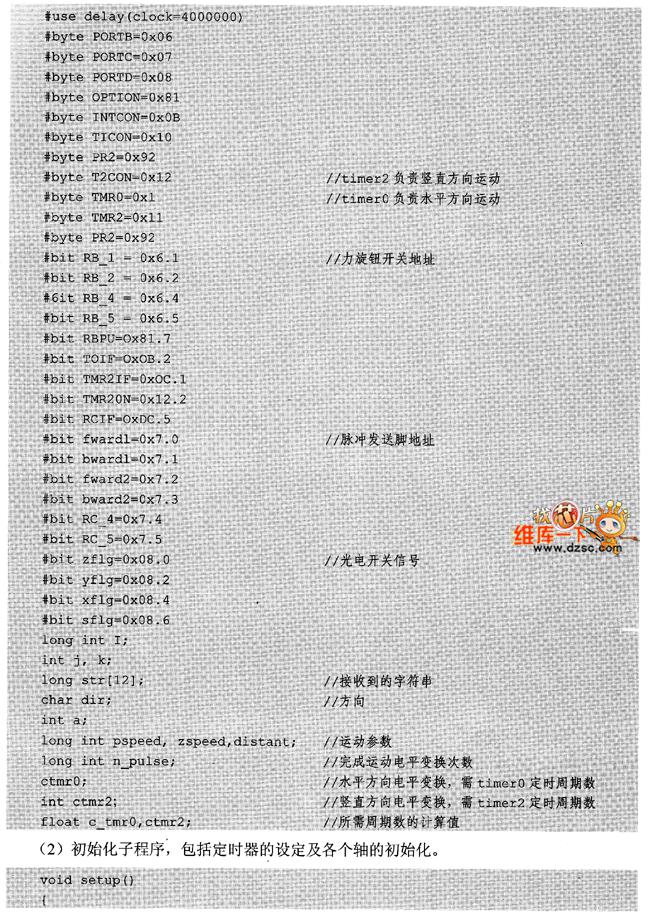
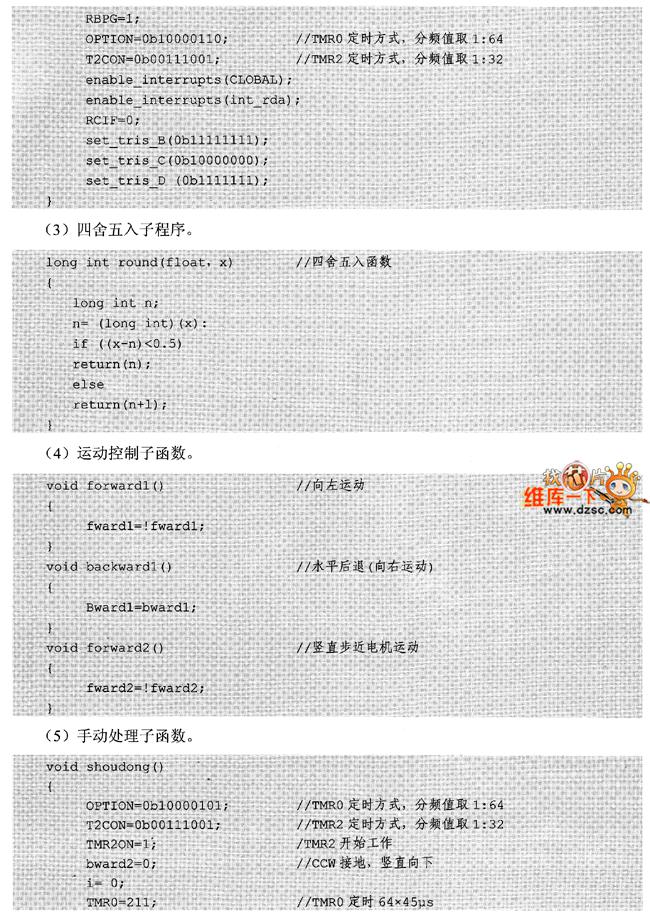
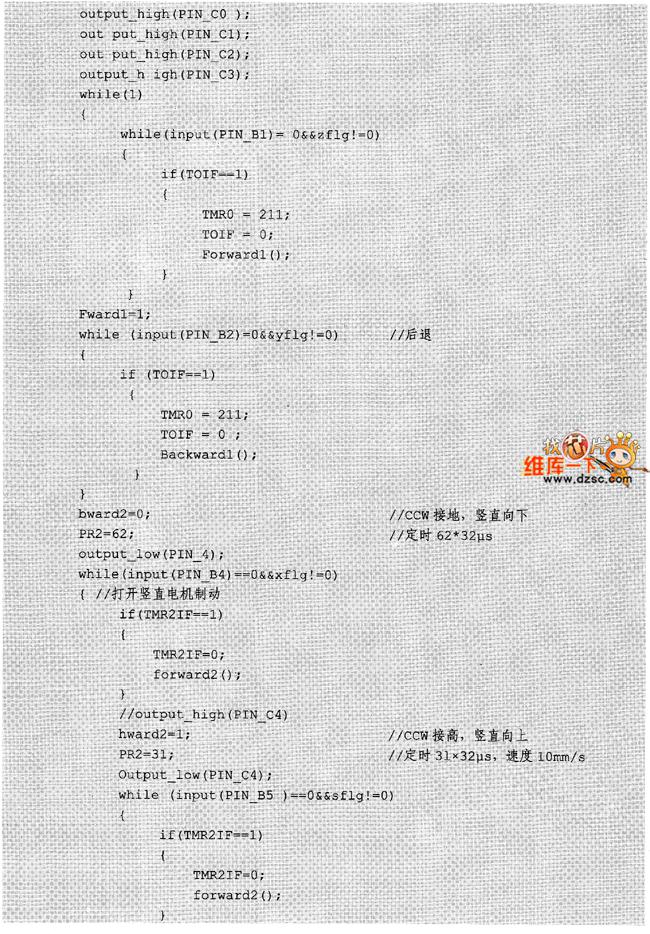
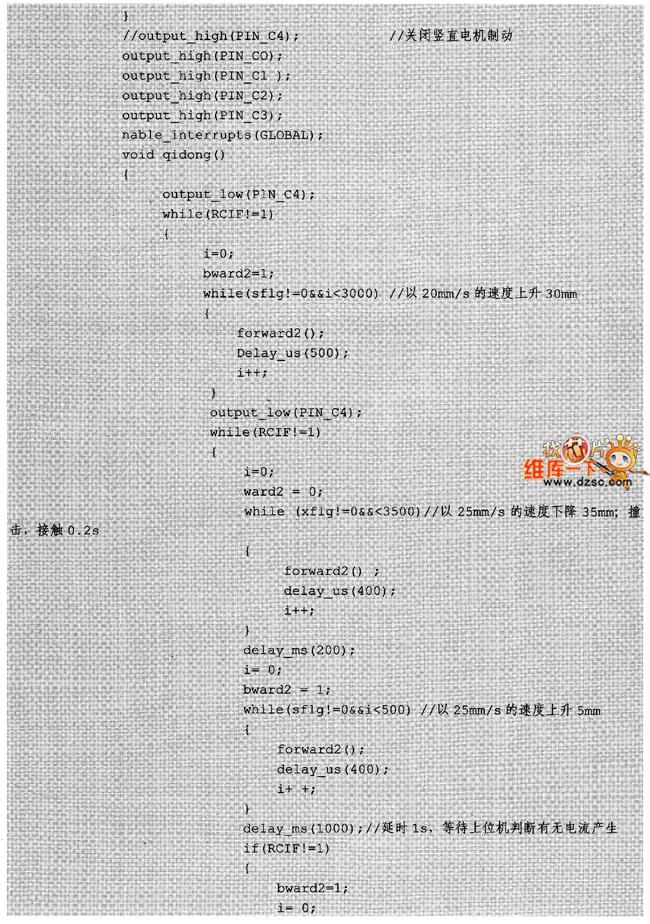
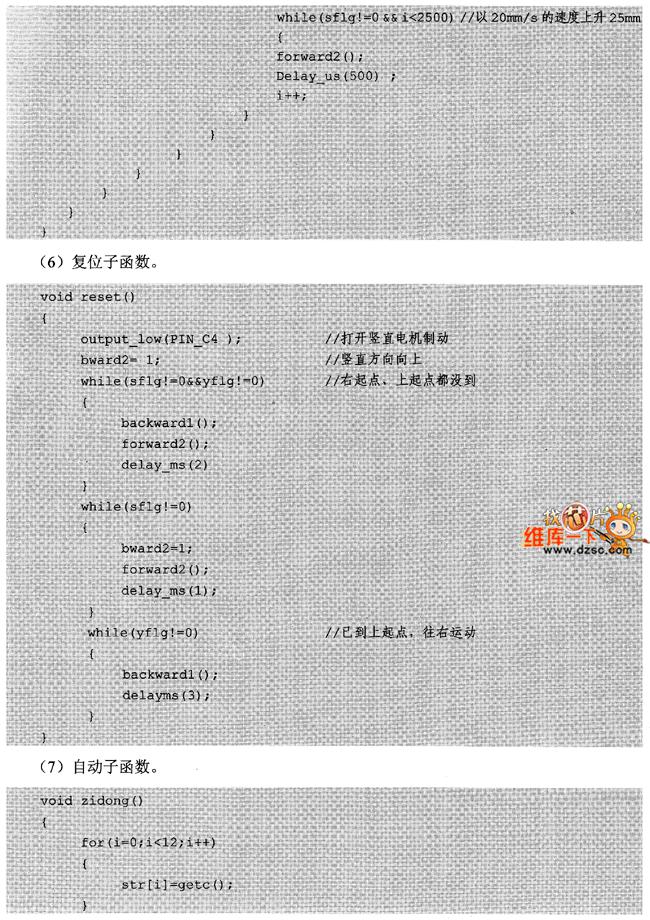
(1)包含必要的頭文件及定義程序用到的全局變量和宏。
:

:
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
153文章
3260瀏覽量
152612 -
控制模塊
+關(guān)注
關(guān)注
2文章
146瀏覽量
19851 -
程序設(shè)計(jì)
+關(guān)注
關(guān)注
3文章
263瀏覽量
31749
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
步進(jìn)電機(jī)的位置控制與速度控制
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的執(zhí)行元件,其 位置控制 與 速度控制 是兩大核心應(yīng)用。雖然兩者在實(shí)現(xiàn)上緊密相關(guān),但控制目標(biāo)和

關(guān)于步進(jìn)電機(jī)脈沖和步距角相關(guān)的問題
步進(jìn)電機(jī)作為一種將電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的執(zhí)行元件,其核心控制參數(shù)——脈沖與步距角的關(guān)系直接決定了系統(tǒng)的精度與動(dòng)態(tài)性能。要深入理解這一機(jī)制,需從步進(jìn)

步進(jìn)電機(jī)發(fā)熱問題及對(duì)策
?步進(jìn)電機(jī)作為一種將電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的開環(huán)控制元件,在自動(dòng)化設(shè)備、3D打印機(jī)、數(shù)控機(jī)床等領(lǐng)域應(yīng)用廣泛。然而在實(shí)際使用過程中,電機(jī)發(fā)熱問題始終困擾著工程師和技術(shù)人員。過高的
步進(jìn)電機(jī)的控制原理
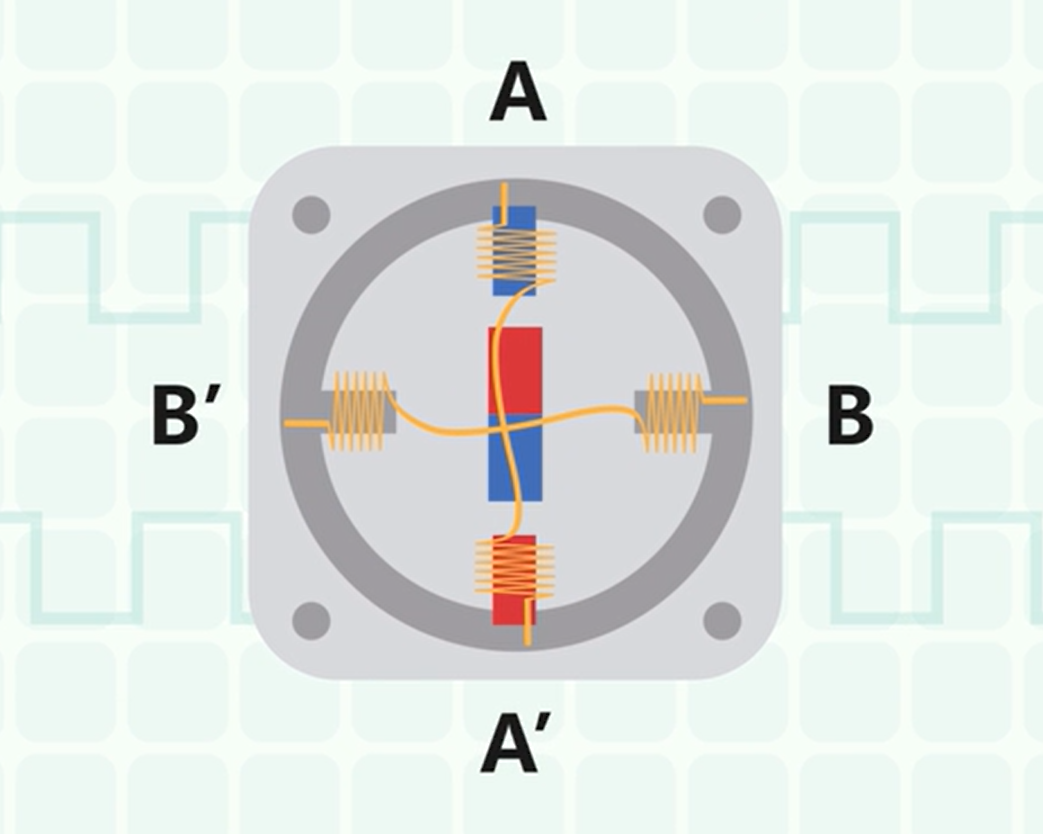
步進(jìn)電機(jī)是數(shù)字控制電機(jī),它將脈沖信號(hào)轉(zhuǎn)變成角位移,即給一個(gè)脈沖信號(hào),步進(jìn)電機(jī)就轉(zhuǎn)動(dòng)一個(gè)角度,因此
發(fā)表于 01-04 08:25
基于UART通訊控制TMC2208/2209模塊驅(qū)動(dòng)兩相四線步進(jìn)電機(jī)
本文將介紹如何通過UART串口通信控制TMC2208/2209步進(jìn)電機(jī)驅(qū)動(dòng)模塊驅(qū)動(dòng)42步進(jìn)電機(jī)。

?DRV8811 步進(jìn)電機(jī)控制器技術(shù)文檔總結(jié)
DRV8811器件為打印機(jī)、掃描儀和其他自動(dòng)化設(shè)備應(yīng)用提供集成的步進(jìn)電機(jī)驅(qū)動(dòng)器解決方案。該器件具有兩個(gè) H 橋驅(qū)動(dòng)器,以及用于控制步進(jìn)電機(jī)的
?DRV8821 雙路步進(jìn)電機(jī)控制器與驅(qū)動(dòng)器技術(shù)文檔總結(jié)
該DRV8821提供雙微步進(jìn)步進(jìn)電機(jī)控制器/驅(qū)動(dòng)器 打印機(jī)、掃描儀和其他辦公自動(dòng)化設(shè)備應(yīng)用的解決方案。
兩個(gè)獨(dú)立的步進(jìn)電機(jī)驅(qū)動(dòng)電路包括
?DRV8818步進(jìn)電機(jī)控制器IC技術(shù)文檔總結(jié)
該DRV8818為打印機(jī)、掃描儀和其他自動(dòng)化設(shè)備應(yīng)用提供集成步進(jìn)電機(jī)驅(qū)動(dòng)器。該器件具有兩個(gè) H 橋驅(qū)動(dòng)器,以及用于控制步進(jìn)電機(jī)的微
伺服電機(jī)和步進(jìn)電機(jī)的核心區(qū)別
大家在運(yùn)動(dòng)控制的時(shí)候是用伺服電機(jī)的還是用步進(jìn)電機(jī)做定位控制了?為什么有時(shí)候用伺服電機(jī),有時(shí)候又

關(guān)于TMC2208與TMC2209的區(qū)別及基于STM32F103控制TMC2209模塊驅(qū)動(dòng)2相4線步進(jìn)電機(jī)
技術(shù),TMC2208提供2 - 32微步選擇,TMC2209支持8 - 64微步選擇。文章最后提供了STM32F103控制TMC2208/TMC2209驅(qū)動(dòng)42步進(jìn)電機(jī)的程序。
單片機(jī)怎么控制步進(jìn)電機(jī)的
電路、程序邏輯和參數(shù)設(shè)置,確保電機(jī)穩(wěn)定運(yùn)行。 控制的核心原理 步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)遵循 “脈沖對(duì)應(yīng)角度” 的原則,每接收一個(gè)脈沖信號(hào),
TMCM-3216步進(jìn)電機(jī)控制器/驅(qū)動(dòng)器模塊
Analog Devices Inc. TMCM-3216步進(jìn)電機(jī)控制器/驅(qū)動(dòng)器模塊是緊湊型3軸雙極步進(jìn)
步進(jìn)電機(jī)控制指令詳解
這些指令主要是針對(duì)用 PLC 直接聯(lián)動(dòng)伺服放大器,目的是可以不借助其他擴(kuò)展設(shè)備(例如1GM 模塊)來進(jìn)行簡單的點(diǎn)位控制, 使用這些指令時(shí)最好配合三菱的伺服放大器 (如 MR-J2)。然而,我們也可以用這些指令來控制

數(shù)據(jù)采集卡與步進(jìn)電機(jī)
本文介紹了步進(jìn)電機(jī)的工作原理,以及如何使用數(shù)據(jù)采集卡控制步進(jìn)電機(jī)動(dòng)作。
剎車步進(jìn)電機(jī)的特點(diǎn)
剎車步進(jìn)電機(jī)作為一種結(jié)合了步進(jìn)電機(jī)精確控制與制動(dòng)功能的特種電機(jī),其獨(dú)特的設(shè)計(jì)和工作原理使其在需要




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論