
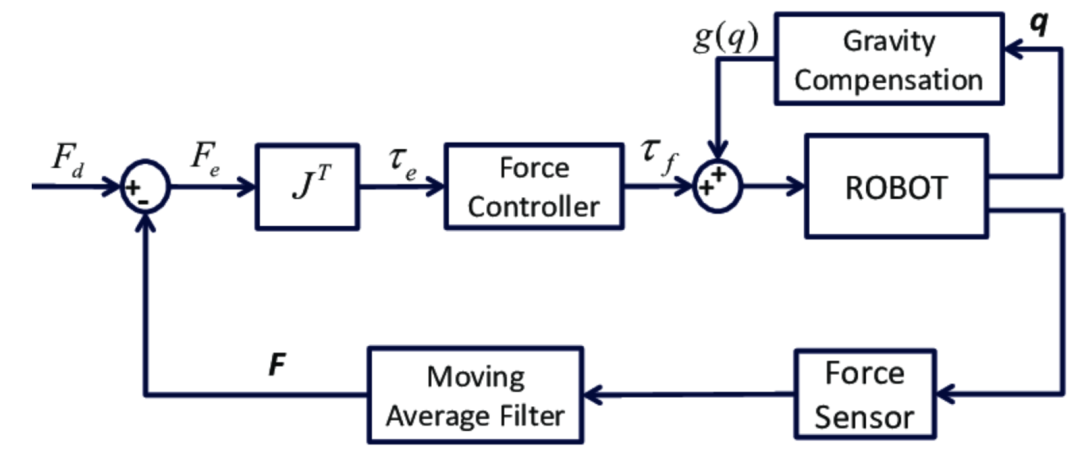
速度模式下外環(huán)力矩控制步驟
在機器人速度模式下的外環(huán)力矩控制中,通常使用速度環(huán)和力矩環(huán)兩個控制環(huán)路來實現(xiàn)。速度環(huán)控制機器人的關節(jié)....
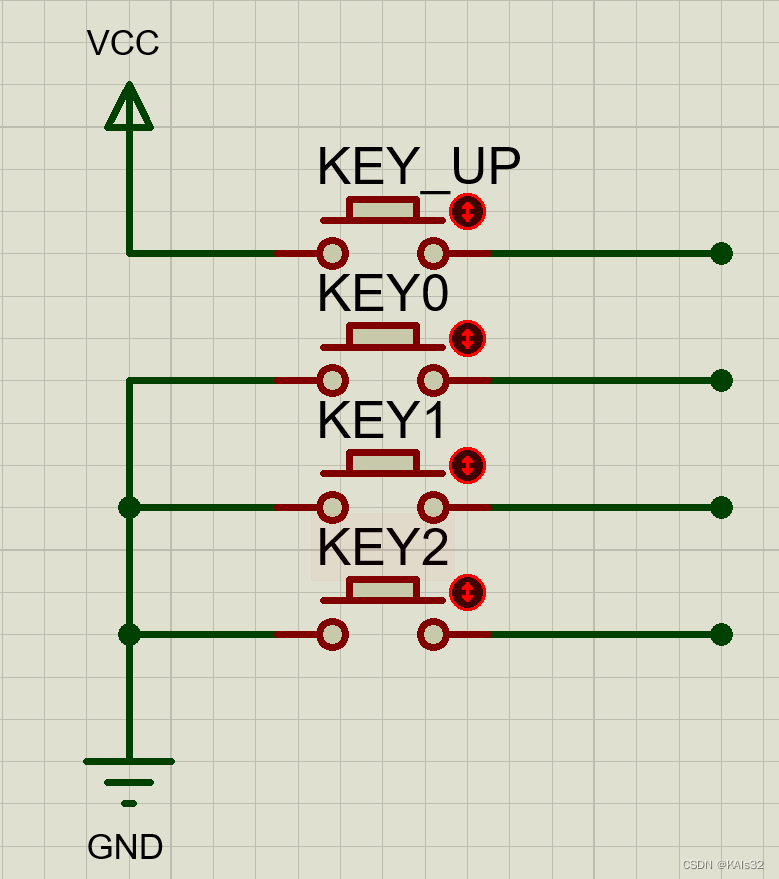
GPIO四種輸出模式介紹
輸出模式下,可由芯片向外輸出電平。例如點亮LED,就需要給LED提供高電平。 GPIO_Mode_O....
機器人阻抗控制實現(xiàn)規(guī)律
從力與運動的角度,阻抗控制實現(xiàn)規(guī)律可以總結如下: 1. 力與位移關系:阻抗控制通過建立力與位移之間的....
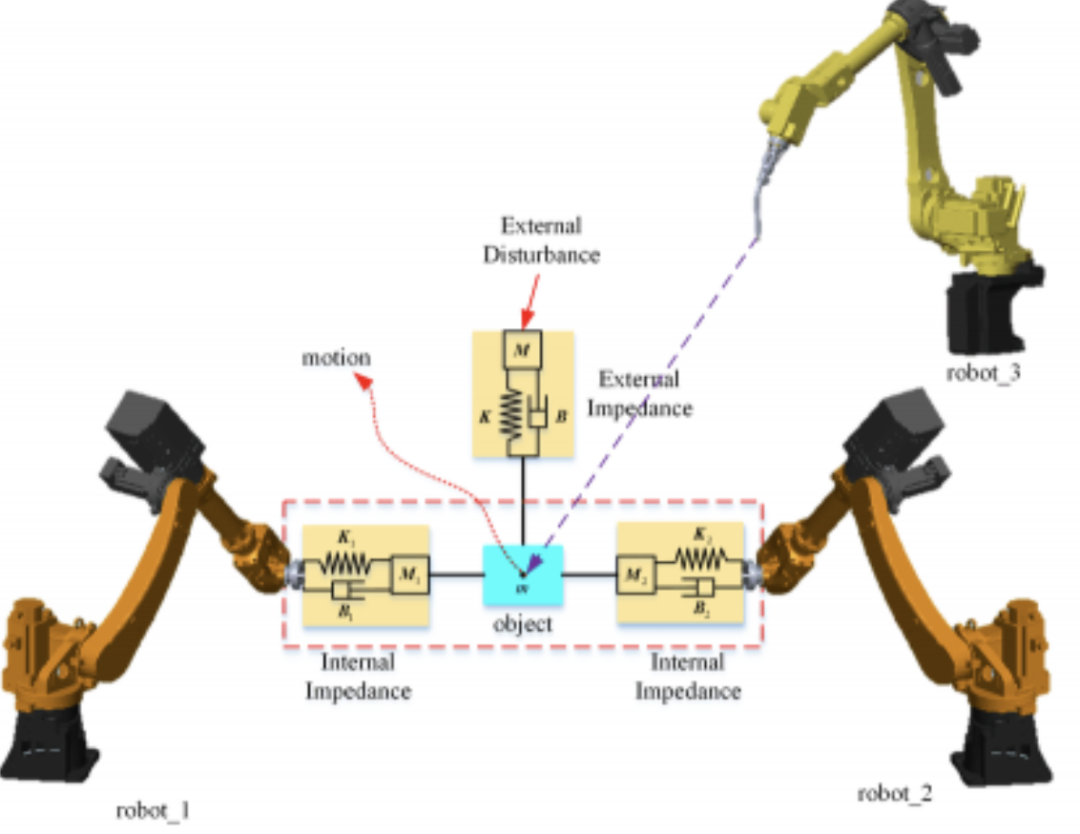
力控機器人阻抗控制的勢與流
力控機器人是一種能夠感知和控制外部力或力矩作用的機器人系統(tǒng)。它具有實時感知和響應外部力的能力,通過傳....
物理人機交互控制性能量化指標有哪些
在物理人機交互控制中,常用的性能量化指標包括: 1. 動作準確性(Action Accuracy):....
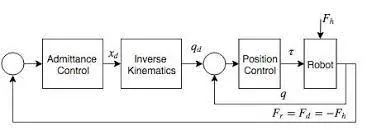

力控機器人的控制框架和性能評估
力控機器人是一種能夠基于外部力量進行控制和交互的機器人系統(tǒng)。與傳統(tǒng)的位置控制機器人相比,力控機器人更....
如何使用MQTT進行數據傳輸
在ros里面,是有專門的工具幫忙做這一步的,但是ros2里面還沒有,不過我看論壇上大家更加推薦使用代....
如何部署一個MQTT服務
1. 選擇哪一種MQTT實現(xiàn)方案 根據前面的介紹,可以知道,要想使用MQTT,必須要有一個服務端。這....
MQTT是什么 MQTT特點
MQTT 是 Message Queuing Telemetry Transport 的縮寫,是一種....
搭建機器人關節(jié)力控制系統(tǒng)步驟
搭建機器人關節(jié)力控制系統(tǒng)需要以下步驟: 1. 選擇合適的電機和傳感器。電機的選取要符合機器人的要求,....
力觸覺感知系統(tǒng)的工作原理
力觸覺感知系統(tǒng)在機器人操作中具有非常重要的作用。它可以檢測機器人末端執(zhí)行器與工件相互作用時產生的三維....
力控機器人是干什么的
力控機器人是一種能夠感知力量并具有實時控制能力的機器人系統(tǒng)。 它們可以在與人類進行精準協(xié)作和合作時,....
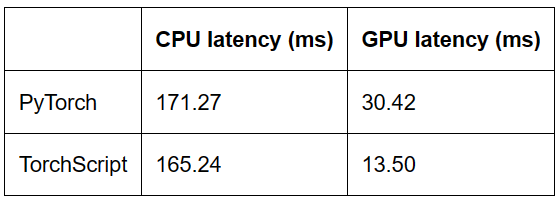
TorchScript的重要特性和用途
PyTorch支持兩種模式:eager模式和script模式。eager模式主要用于模型的編寫、訓練....
機器人力矩傳感器分辨力是什么
機器人關節(jié)力矩傳感器的分辨力是指其輸出信號能夠區(qū)分的最小力矩值。 一般來說,分辨力越高的傳感器能夠感....
機器人力矩傳感器原理
機器人力矩傳感器原理: 在扭矩傳感器中,通常會使用一種稱為應變片的元件來檢測彈性變形。 應變片是一種....
限制機器人力控性能的因素有哪些
限制機器人力控性能的因素有很多,以下是一些主要的因素: 1. 力覺傳感器性能:力覺傳感器是機器人力控....
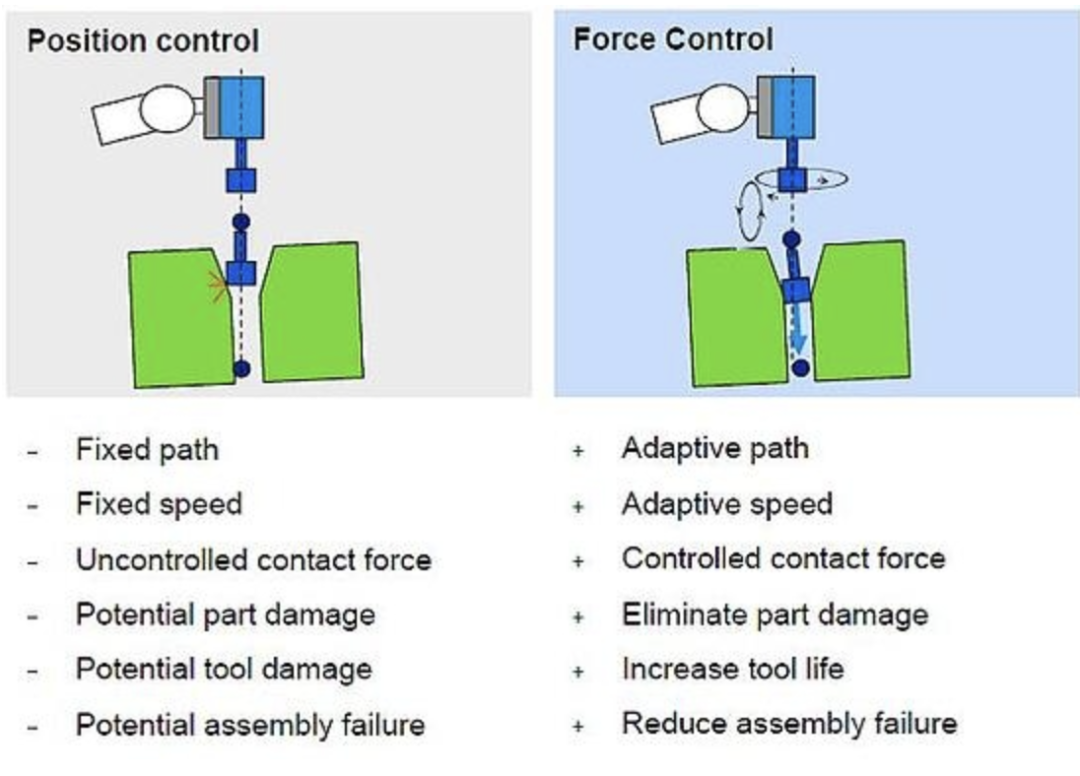
機器人力控的性能指標有哪些
在機器人的操作任務中,處理機器人和環(huán)境之間的物理接觸是非常重要的。 由于機器人系統(tǒng)的復雜性和不確定性....
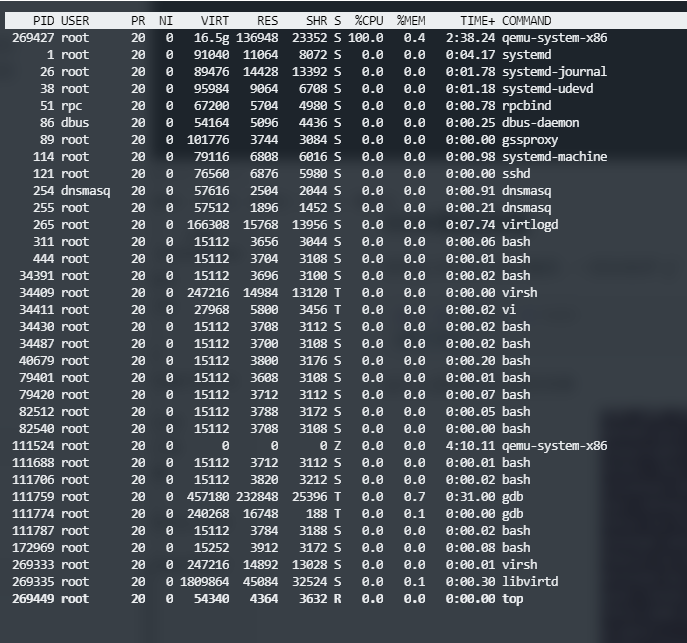
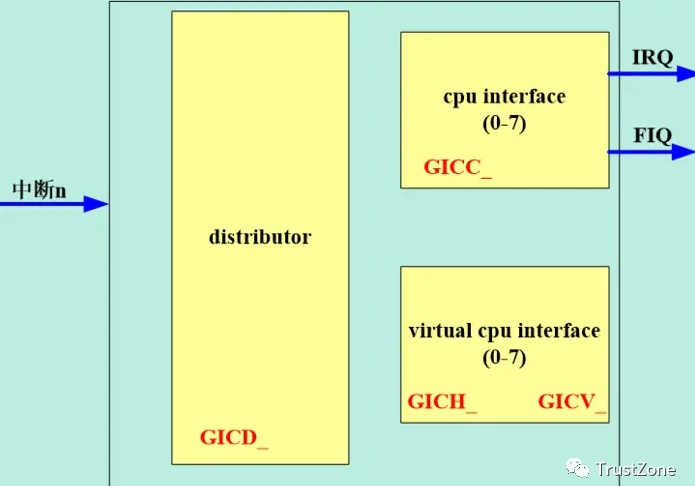
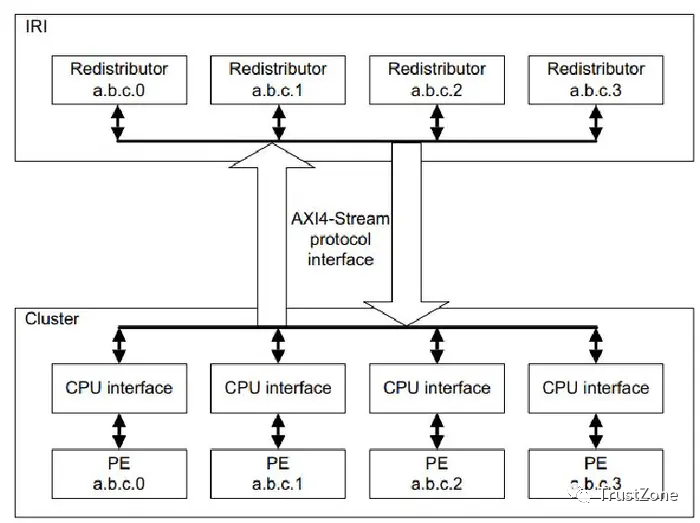
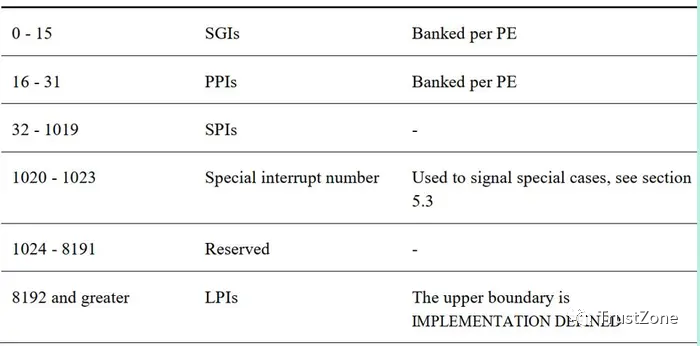
gic的寄存器 gicv3的LPI中斷
(1)gicv2的寄存器 gicv2寄存器,都是使用memory-mapped的方式去訪問的 ? ?....



 工商網監(jiān)
工商網監(jiān)