
Linux性能優(yōu)化:Cache對(duì)性能的影響
Cache對(duì)性能的影響首先我們要知道,CPU訪問(wèn)內(nèi)存時(shí),不是直接去訪問(wèn)內(nèi)存的,而是先訪問(wèn)緩存(cac....

Linux中如何在stty修改串口波特率
Linux內(nèi)核啟動(dòng)后,串口的波特率通常是115200或者9600,此時(shí)如果想要修改串口的波特率,在s....
如何使用gdbserver對(duì)目標(biāo)開(kāi)發(fā)板上的程序進(jìn)行遠(yuǎn)程調(diào)試
本篇講解如何使用 gdbserver 對(duì)目標(biāo)開(kāi)發(fā)板上的程序進(jìn)行遠(yuǎn)程調(diào)試。 安裝 GDBSERVER ....
Linux內(nèi)核啟動(dòng)速度優(yōu)化的幾個(gè)方法
kernel壓縮方式 kernel 有不同的壓縮格式,常見(jiàn)的如 gz 、 xz 、 lzma 等。 ....
幾種統(tǒng)計(jì)內(nèi)核啟動(dòng)耗時(shí)的方法
啟動(dòng)耗時(shí)統(tǒng)計(jì) printk time 打開(kāi)kernel配置: kernel hacking --- ....

如何使用valgrind對(duì)代碼進(jìn)行內(nèi)存泄露檢測(cè)
代碼可能存在 內(nèi)存泄露 怎么辦? 使用 valgrind 可以對(duì)代碼進(jìn)行內(nèi)存泄露檢測(cè)。 valgri....

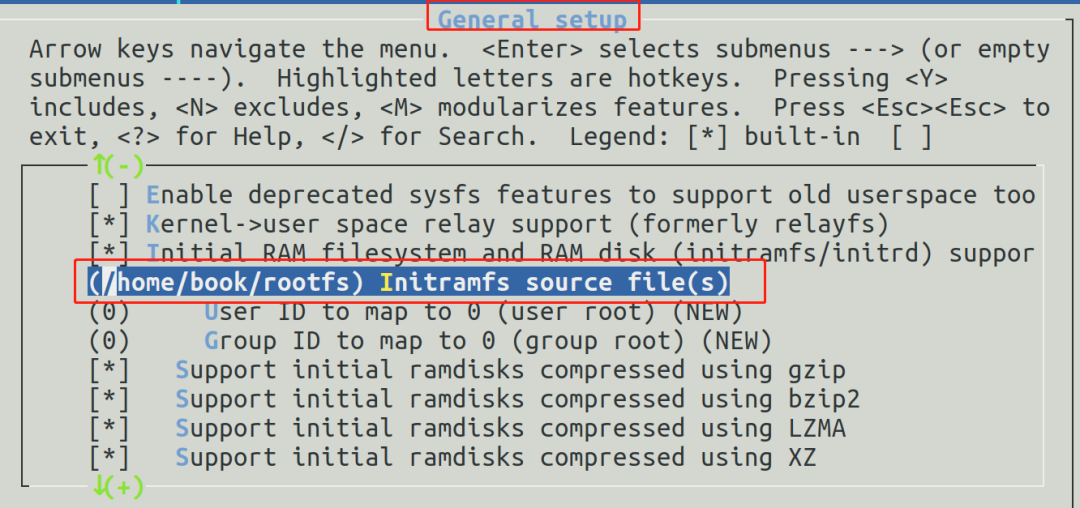
移植Linux內(nèi)核ramfs和ramdisk文件系統(tǒng)
在移植Linux內(nèi)核早期時(shí),如果flash等存儲(chǔ)設(shè)備的驅(qū)動(dòng)還沒(méi)寫(xiě)好,可以將文件系統(tǒng)放到內(nèi)存中運(yùn)行。 ....
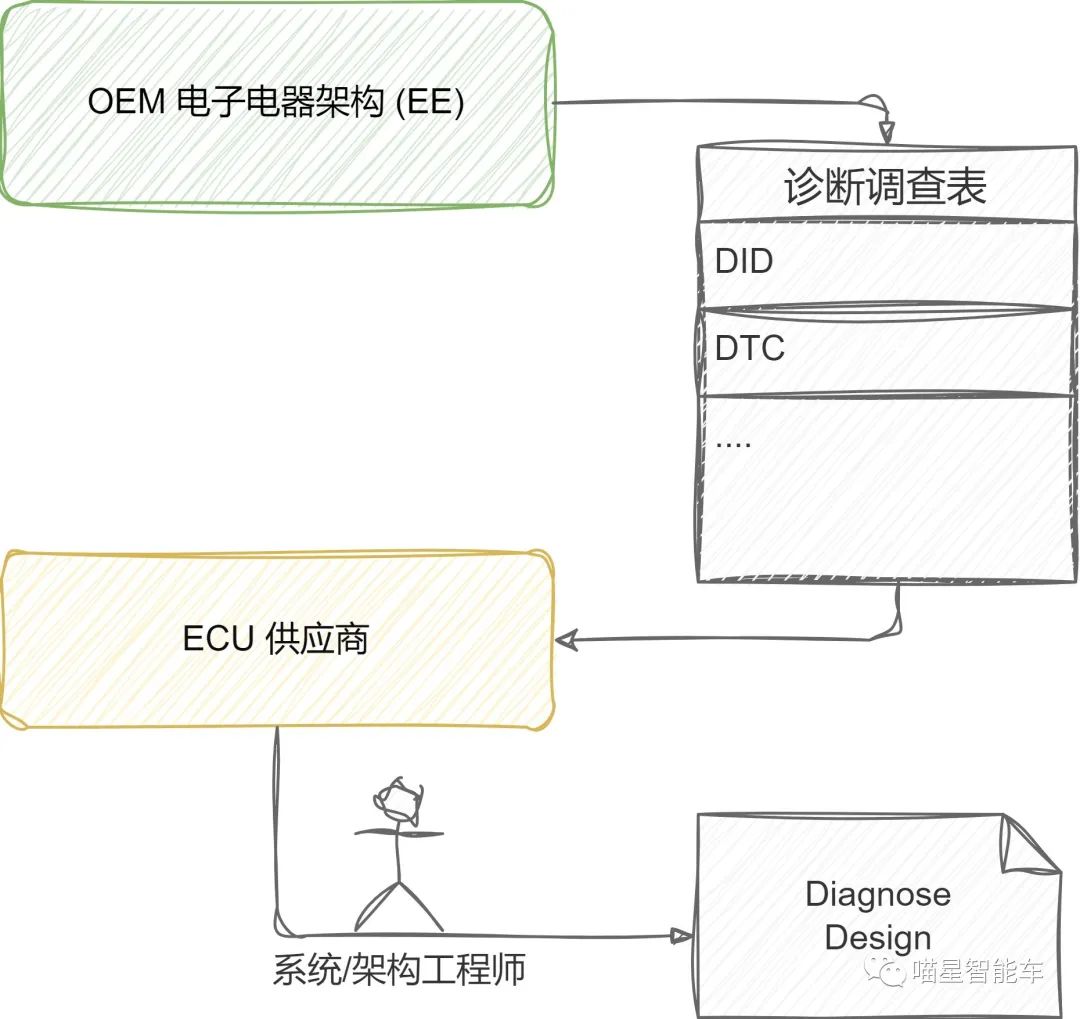
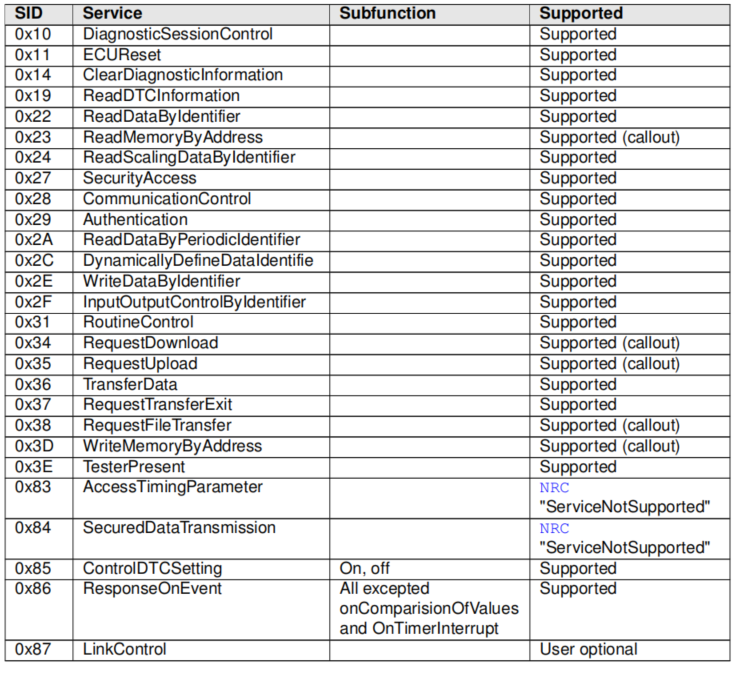
AutoSAR中的診斷模塊是什么
什么是診斷 首先,舉個(gè)一個(gè)簡(jiǎn)單的例子來(lái)說(shuō)明診斷的重要性:想象你的汽車是一個(gè)經(jīng)常生病的孩子,每當(dāng)它出現(xiàn)....

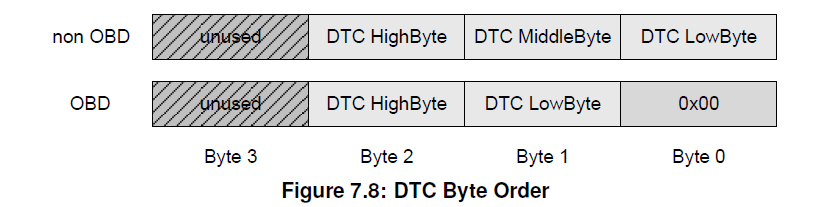
AUTOSAR診斷系統(tǒng)事件內(nèi)存管理
事件內(nèi)存管理定義為在DEM模塊中添加、更新和刪除事件內(nèi)存條目的過(guò)程。DEM模塊確定事件內(nèi)存條目是新的....
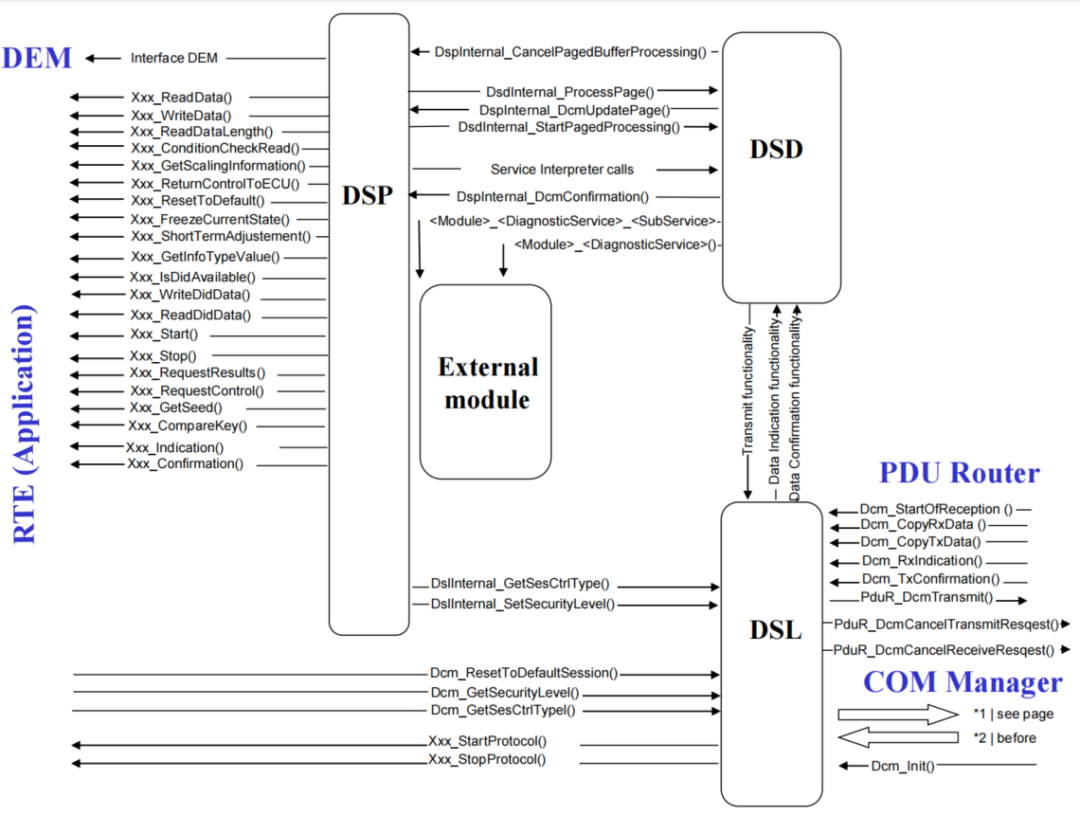
DSP概述 模塊功能介紹
DSP概述 當(dāng)接收到來(lái)自DSD子模塊的調(diào)用請(qǐng)求時(shí),DSP總是執(zhí)行以下基本的處理步驟: ● 分析接收到....
AUTOSAR診斷DSD模塊功能介紹
支持檢查診斷服務(wù)標(biāo)識(shí)符并調(diào)整診斷消息 如果識(shí)別出新的診斷消息,DSL子模塊應(yīng)觸發(fā)DSD子模塊。DSD....
DSL模塊的功能有哪些
DSL模塊的功能 診斷請(qǐng)求處理 ● 將從PduR模塊發(fā)出的請(qǐng)求轉(zhuǎn)發(fā)到DSD子模塊。DSL子模塊應(yīng)調(diào)用....
自動(dòng)駕駛系統(tǒng)(ADS)的開(kāi)發(fā)過(guò)程
開(kāi)發(fā)接口 除了功能之外,還必須關(guān)注自動(dòng)駕駛系統(tǒng)(ADS)的開(kāi)發(fā)過(guò)程。下面簡(jiǎn)要概述調(diào)試功能,這些功能用....
L1輔助駕駛到L4自動(dòng)駕駛的五個(gè)示例系統(tǒng)
下面分別介紹從L1輔助駕駛到L4自動(dòng)駕駛的五個(gè)示例系統(tǒng)。? ? ? ? ?超低端系統(tǒng) 該系統(tǒng)代表一個(gè)....
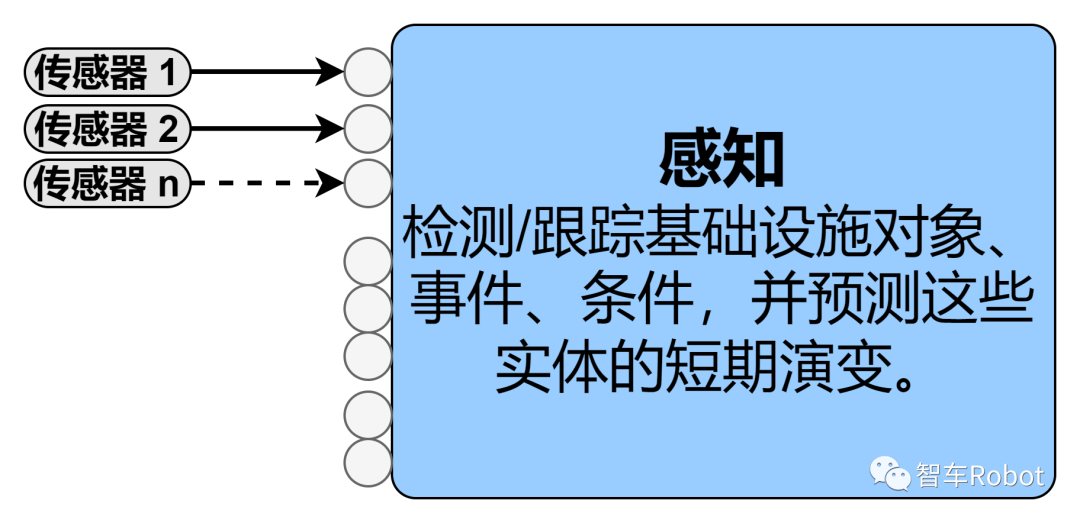
自動(dòng)駕駛示例工作負(fù)載介紹
功能模塊圖基準(zhǔn)測(cè)試 基準(zhǔn)測(cè)試活動(dòng)主要圍繞兩個(gè)方面: ?對(duì)應(yīng)于功能模塊圖構(gòu)建模塊的基準(zhǔn)測(cè)試。例如深度學(xué)....

自動(dòng)駕駛傳感器前處理介紹
攝像頭前處理流程 ?自動(dòng)駕駛HDR:為適應(yīng)自動(dòng)駕駛所處的高動(dòng)態(tài)范圍環(huán)境,先進(jìn)的圖像傳感器采用同時(shí)多曝....
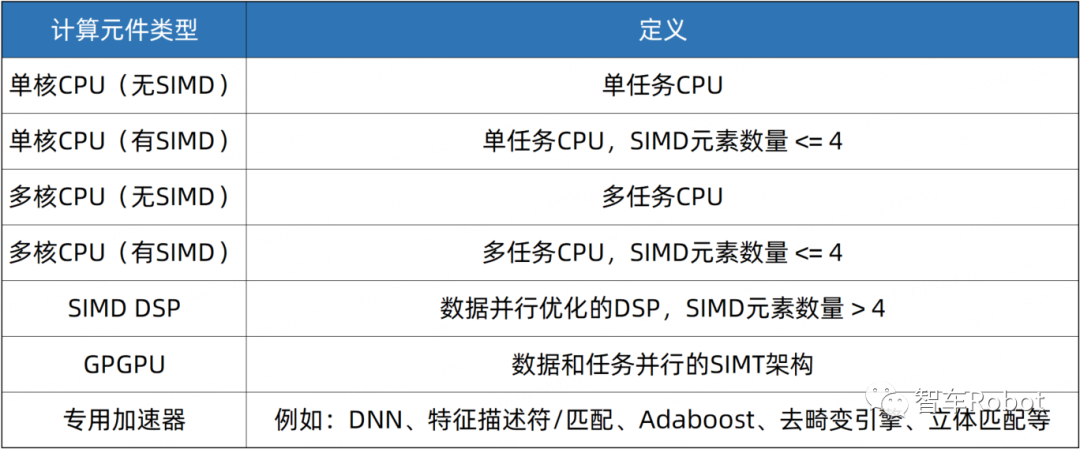
在SoC中實(shí)現(xiàn)的計(jì)算單元
在SoC中實(shí)現(xiàn)的計(jì)算單元 當(dāng)前的自動(dòng)駕駛/先進(jìn)駕駛輔助系統(tǒng)片上系統(tǒng)(SoC)通過(guò)集成不同計(jì)算特性的計(jì)....

自動(dòng)駕駛系統(tǒng)架構(gòu)狀態(tài)和配置介紹
狀態(tài) ? 乘客狀態(tài):提供有關(guān)自主車輛每個(gè)乘客(包括駕駛員)狀態(tài)的描述。信息可能包括存在、注意力、情緒....
系統(tǒng)架構(gòu)圖中功能模塊數(shù)據(jù)流與狀況
? 自身運(yùn)動(dòng):描述自主車輛相對(duì)于世界坐標(biāo)系的運(yùn)動(dòng)。 --提供反映自主車輛動(dòng)態(tài)條件的信息,用于確定機(jī)動(dòng)....
自動(dòng)駕駛系統(tǒng)信號(hào)描述
信號(hào)描述 圖中的模塊連接在抽象級(jí)別上顯示了數(shù)據(jù)從一個(gè)功能模塊傳遞到另一個(gè)功能模塊的生產(chǎn)者-消費(fèi)者關(guān)系....
驅(qū)動(dòng)動(dòng)模塊之間如何更改模塊掛載順序
如果驅(qū)動(dòng)模塊之間有依賴,需要更改模塊掛載順序,有三種方式: 1、增加一個(gè)優(yōu)先級(jí),比如 8。或者把自己....
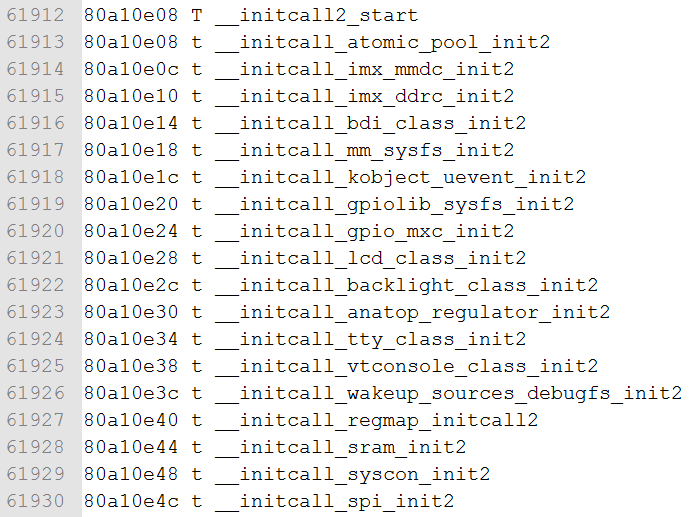
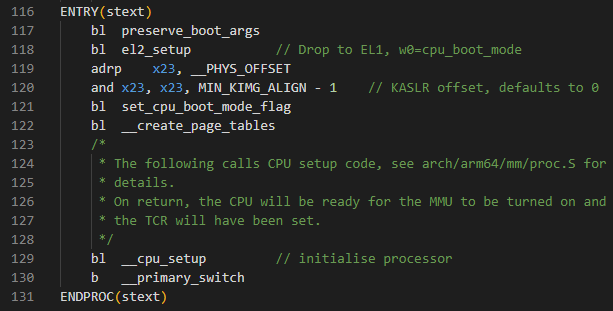
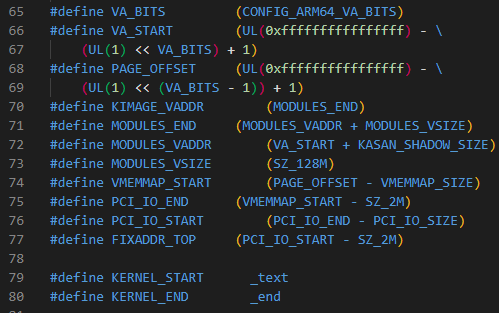
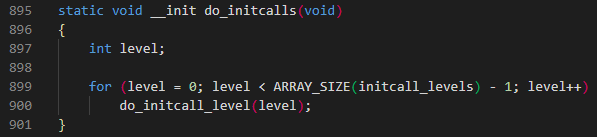
Linux驅(qū)動(dòng)是如何掛載的
start_kernel 函數(shù)最后調(diào)用的是 rest_init 函數(shù),其實(shí) rest_init 函數(shù)....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)